Приборы и системы ориентации, стабилизации и навигации
-
Приборы систем управления летательных аппаратов

Руководитель специализации
кандидат технических наук, доцент
Подчезерцев Виктор Павлович
Сердцем большинства приборов и систем ориентации, стабилизации и навигации являются
гироскопы - инерциальные датчики параметров углового движения объекта, на котором они
установлены. Будучи объединены вместе с устройствами, измеряющими линейные ускорения
(акселерометрами), они позволяют создавать приборы и системы определяющие ориентацию объекта вокруг его центра масс, положение его центра масс в пространстве и обеспечивать сохранение углового положения любых объектов (стабилизацию) в пространстве.
Основным направлением научной и инженерной деятельноcти выпускников специализации является разработка и исследование гироскопических датчиков, предназначенных для определения параметров пространственного движения любых подвижных объектов:
- гироскопов в кардановом подвесе, динамически настраиваемых гироскопов, гироскопов со сферическим подвесом,
-датчиков угловой скорости и интегрирующих гироскопов,
-волоконно-оптических и лазерных гироскопов,
-вибрационных микромеханических гироскопов,
а также гироскопических приборов и систем ориентации на их основе:
- гироскопических и гиромагнитных компасов, гирополукомпасов,
- гировертикалей, гирогоризонтов и авиагоризонтов,
- курсовертикалей и систем ориентации,
- гироскопических стабилизаторов.Учебные и научно-исследовательские лаборатории специализации
- Лаборатория микромеханических приборов
- Лаборатория гиростабилизаторов
- Лаборатория гирокомпасов
- Лаборатория гироприборов
-
Одной из главных тенденций развития бортовой аппаратуры космической техники и современных средств вооружения является расширение их функциональных возможностей и уменьшение массогабаритных характеристик, что требует уменьшения массы и габаритов чувствительных элементов и командных приборов при сохранении достаточной точности. В течение последнего десятилетия при постоянном повышении требований по снижению массы, габаритных размеров и потребляемой мощности таких элементов и приборов, были разработаны несколько современных технологий изготовления микросистем, которые способствовали созданию принципиально новых приборов для использования в различных областях науки и техники. Одной из таких новых технологий является технология микроэлектромеханических систем (МЭМС), основанная на традиционной технологии производства полупроводниковых микросхем.
Особенностями таких приборов являются малые масса, габариты и низкая стоимость. При этом размеры многих конструктивных элементов в таких приборах зачастую не превышают 1 мм, а иногда и десятых и даже сотых долей мм.
К устройствам, изготовленным по данной технологии - микроакселерометрам, микрогироскопам, датчиковым модулям и микрооптоэлектромеханическим системам, входящим в состав систем навигационной техники для космической, ракетной и авиационной отраслей, предъявляются особые требования по долговечности, работоспособности в жестких условиях эксплуатации при повышенных температурах, механических и радиационных воздействиях и т.д.
Кроме того, микроэлетромеханические устройства нашли широкое коммерческое применение в силу их неоспоримых преимуществ по массе, габаритам и стоимости. Возможные сферы коммерческого применения микроэлектромеханических приборов:
- автомобильная промышленность: навигационные системы, улучшенный контроль подушек безопасности, улучшенный круиз-контроль, мониторинг аварийных ситуаций, датчик переворота по крену, динамика ходовой части, управление фарами, инструментарий и вспомогательное оборудование;
- товары широкого потребления: гироскопические указатели (компьютерная "мышь") и пульты дистанционного управления, стабилизация изображения в фото, видео и телекамерах, игрушки и спортивное оборудование, виртуальная реальность, анимация;
- коммерческая авиация: оборудование кабины самолета, управление полетом, испытательное оборудование, мониторинг аварийных ситуаций, стабилизация антенн, стабилизация климатических зондов, демпфирование движения, стабилизация электрооптических систем, беспилотные летательные аппараты;
- промышленность: управление оборудованием, измерение угловых вибраций, системы мониторинга, самонаводящиеся объекты, стабилизированные платформы, управление и стабилизация роботов, контроль колебаний зубчатых передач, оборудование для горной промышленности, оборудование для подводного наблюдения, обнаружение сейсмической активности, в инклинометрах для измерения профиля нефтяных и газовых скважин в процессе бурения:
- медицинская техника: контроль движений тела, вибрационная диагностика, контроль над парализованными пациентами, хирургические инструменты, стабилизация инвалидных кресел, управление и мониторинг движений искусственных конечностей.
В соответствии с этими тенденциями на кафедре в течении 20 лет ведутся работы по созданию микромеханических акселерометров, а с 2000 года и микромеханических гироскопов.
Основными направлениями научной и учебной деятельности в области микросистемной техники на кафедре ИУ2 являются:
- развитие новых технологических процессов для создания точных навигационных приборов на базе микротехнологий;
- теоретические и экспериментальные исследования микромеханических навигационных приборов;
- подготовка квалифицированных кадров для предприятий, специализирующихся в области создания микромеханических навигационных приборов.
На кафедре выполнен целый комплекс разработок, связанных с широким спектром исследований по созданию миниатюрных приборов с использованием пьезоэлектрических технологий и технологий травления кремния:
- теоретические и экспериментальные исследования в области создания кремниевых микромеханических гироскопов и акселерометров;
- в сотрудничестве с российскими ("Научно-Исследовательский Институт Прикладной Механики им. академика В.И.Кузнецова") и зарубежными (POONGSAN FNS) предприятиями выполнен ряд разработок по созданию микромеханических датчиков угловых скоростей. Задача повышения точности таких приборов в ближайшие 10 лет не утратит своей значимости.;
- в рамках сотрудничества с ОАО "Раменское Приборостроительное Конструкторское Бюро", филиал ФГУП "ЦЭНКИ" "Научно-Исследовательский Институт Прикладной Механики им. академика В.И.Кузнецова", ОАО "Пермская Научно-Производственная Приборостроительная Компания", ОАО "Арзамасский приборостроительный завод" разрабатываются прецизионные акселерометры.;
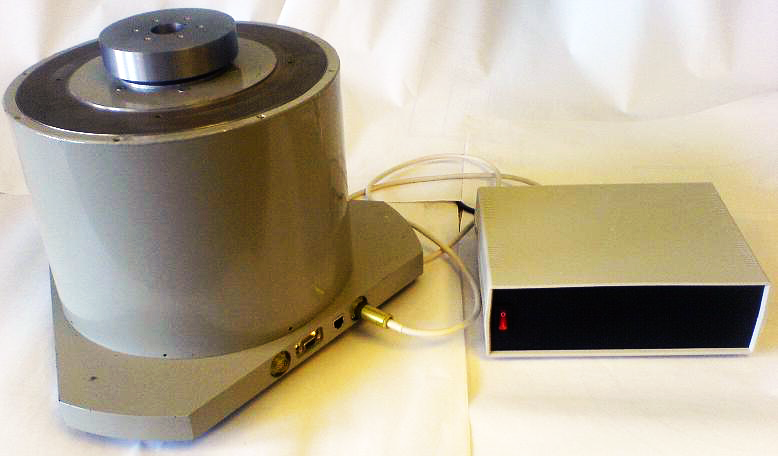
- в рамках проводимых работ по разработке микромеханических гироскопов и акселерометров создано четыре комплекса испытательного оборудования для экспериментальных исследований разрабатываемых датчиков.
- в сотрудничестве с ОАО "Научно-Исследовательским Институтом "ЭЛПА" разработана серия балочных пьезоэлектрических гироскопов.










-
На кафедре ИУ2 долгие годы с успехом функционирует лаборатория гиростабилизаторов оптических приборов (теле-, видео-, фото- и кинокамер).
Работы по созданию таких систем начались в 70-х годах XX века и за это время было создана целая серия гироскопических стабилизаторов оптических приборов.
На сегодняшний день невозможно представить современное телевидение и кино без применения специальных технических средств для получения оригинальных кадров, снятых с наземных, надводных и летательных подвижных объектов: самолетов, вертолетов, автомобилей, катеров и т.д. К таким техническим средствам в первую очередь относятся гироскопические стабилизаторы кино- и телекамер.
В настоящее время гироскопические стабилизаторы кино- и телекамер не являются редкостью, но почти 40 лет назад, когда в МГТУ им. Н.Э.Баумана были созданы первые прототипы современных гиростабилизаторов, такие устройства были инновационными, и их применение кардинально изменило представления о возможностях съемочной кино- и телеаппаратуры, а качество воспроизведения высокодинамичных сцен подняло на значительно более высокий уровень.
Многие из существующих гироскопических устройств, стоящих на вооружении у современных производителей кино- и телепродукции, являются воплощением идей, принципов и разработок, реализованных на кафедре ИУ2 "Приборы и системы ориентации, стабилизации и навигации" МГТУ им. Н.Э.Баумана. Так в 1974 году на кафедре ИУ-2 (в то время П-4) совместно с Научно-исследовательским кинофотоинститутом (НИКФИ) была успешно проведена разработка устройства для стабилизации углового положения ручной кинокамеры 1-КСР. В 1975-1976 годах разработан первый и единственный до настоящего времени гиродемпфер, предназначенный для эффективного подавления колебаний основания, который превосходил по своим характеристикам существовавшие на тот момент гиродемпферы иностранного производства в силу использования в нем вместо механических пружин специальный электрические обратные связи. В 1977-1978 годах на кафедре ИУ2 был создан первый трехосный гироскопический стабилизатор киноаппарата 1-КСР-2М.
Созданный незадолго до 1980 года трехосный гиростабилизатор с дополниттельной следящей рамой 2ГСП уже во многом превосходил большинство существовавших на тот момент гиростабилизаторов. Гиростабилизатор с успехом использовался при съемках художественных фильмов и спортивных трансляций (в том числе и в 1980 году во время проведения Московской олимпиады) при съемках с катера, вертолета и других подвижных объектов.
Съемки документального фильма "Бриз", проведенные гиростабилизатором ГСП-2 с вертолета, в 80-ых годах XX века были удостоены малого "Оскара".
1994 год для лаборатории ознаменовался созданием гиростабилизатора 4ГСП, которые выполнен с оригинальным консольным наружным кардановым подвесом и предназначен для трехосной угловой стабилизации кино- и телеаппаратуры. В стабилизаторе в качестве чувствительных элементов были использованы волоконно-оптические гирсокопы, впервые установленные по осям стабилизации на соответствующих рамах карданова подвеса. Это позволило обеспечить гораздо большие рабочие углы прокачки гиростабилизатора, а также увеличить скорость управления.
На момент создания и до настоящего времени схема 4ГСП представляет собой оптимальное решение для создания трехосных гироскопических стабилизаторов кино- и телеаппаратуры для использования на подвижных объектах различного типа.
Практически ни одни съемки с подвижных объектов во всем мире не обходятся без таких систем гиростабилизации, от рекламных роликов автомобилей до нашумевших голливудских блокбастеров. Среди большого числа существующих и активно используемых на сегодняшний день для создания кино- и телепродукции гиростабилизированных систем в первую очередь следует отметить устройства, созданные в ЗАО "Лесков" и фирмой "Фильмотехник". Системы во многом похожи, поскольку изначально имеют одного "прародителя" - гиростабилизатор 4ГСП. Их можно назвать лидерами этого направления. Для съемок динамичных сцен современных кинофильмов помимо стабилизации камеры используется также и стабилизация операторского крана, установленного на подвижном объекте. В последние годы этим компаниям были вручены еще три технических "Оскара" за качество съемок с подвижных объектов.
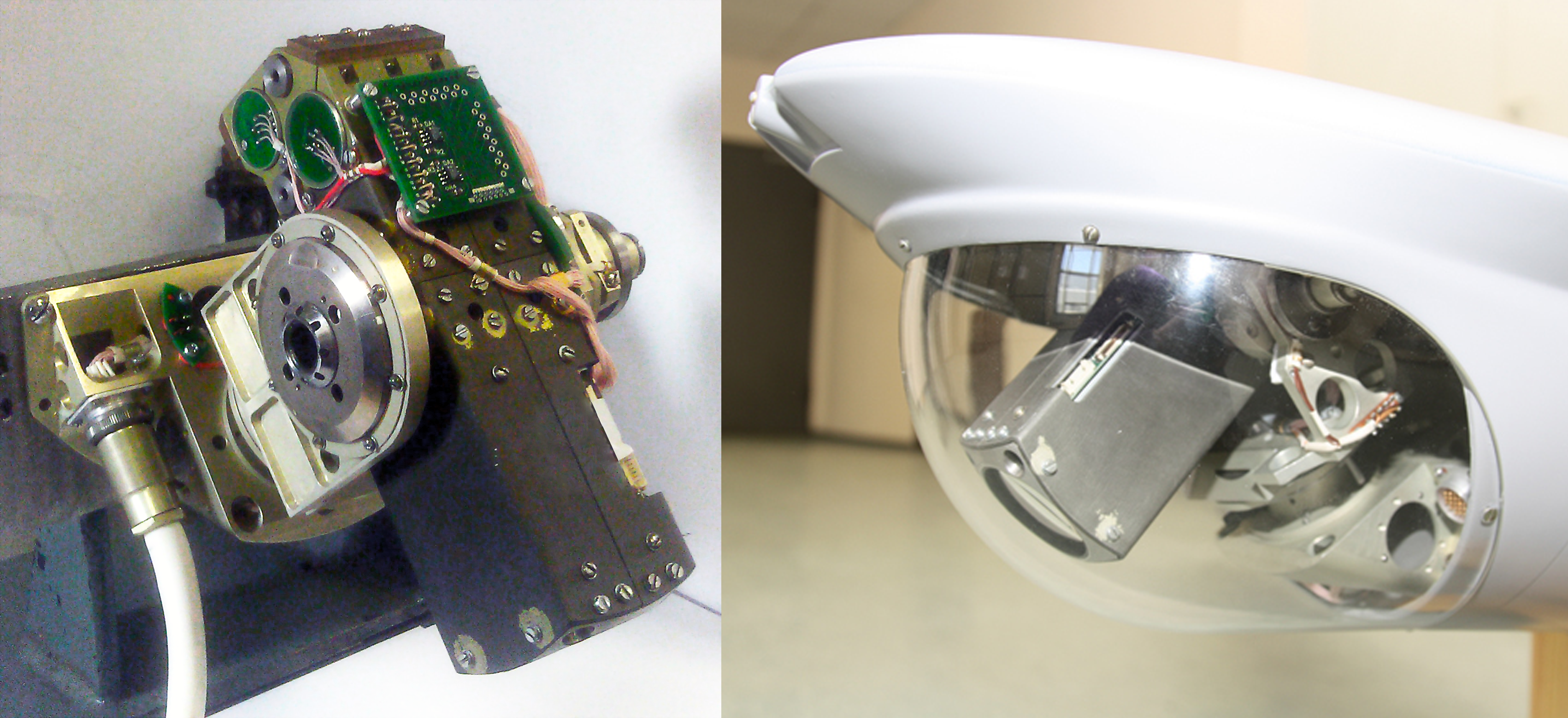
На сегодняшний день лаборатория продолжает работы по созданию гироскопических стабилизаторов оптических приборов, в том числе и малогабаритных, как применяющихся при съемках телевизионных передач, так и для использования в беспилотных летательных аппаратах.
Так в 2009 году на кафедре ИУ2 разработан малогабаритный гиростабилизатор для миниатюрной цифровой камеры для использования на сверхлегком углепластиковым кране Polecam. А в 2011 году малогабаритный гиростабилизатор телекамеры для беспилотного аппарата.
В рамках приоритетного направления разработок в области построения систем противодействия терроризму, военной и специальной техники одним из основных направлений научной деятельности университета объявлена разработка средств и технологий для систем разведки и целеуказания. Перспективными в этом направлении являются работы по созданию беспилотных летательных аппаратов, а также гиростабилизированных оптико-электронных систем обзора и мониторинга окружающего пространства с летательного аппарата (в том числе и беспилотного), поиска, обнаружения и распознавания людей, автомобилей и других технических средств при решении задач, связанных с разведкой, охраной границ, полицейского контроля, противодействия терроризму и т.д. В этой связи на кафедре ИУ2 с 2015 года совместно с ОАО "ЦНИИ "Циклон" ведутся работы по созданию серии гиростабилизированных оптико-электронных систем для использования на беспилотных и пилотируемых летательных аппаратах.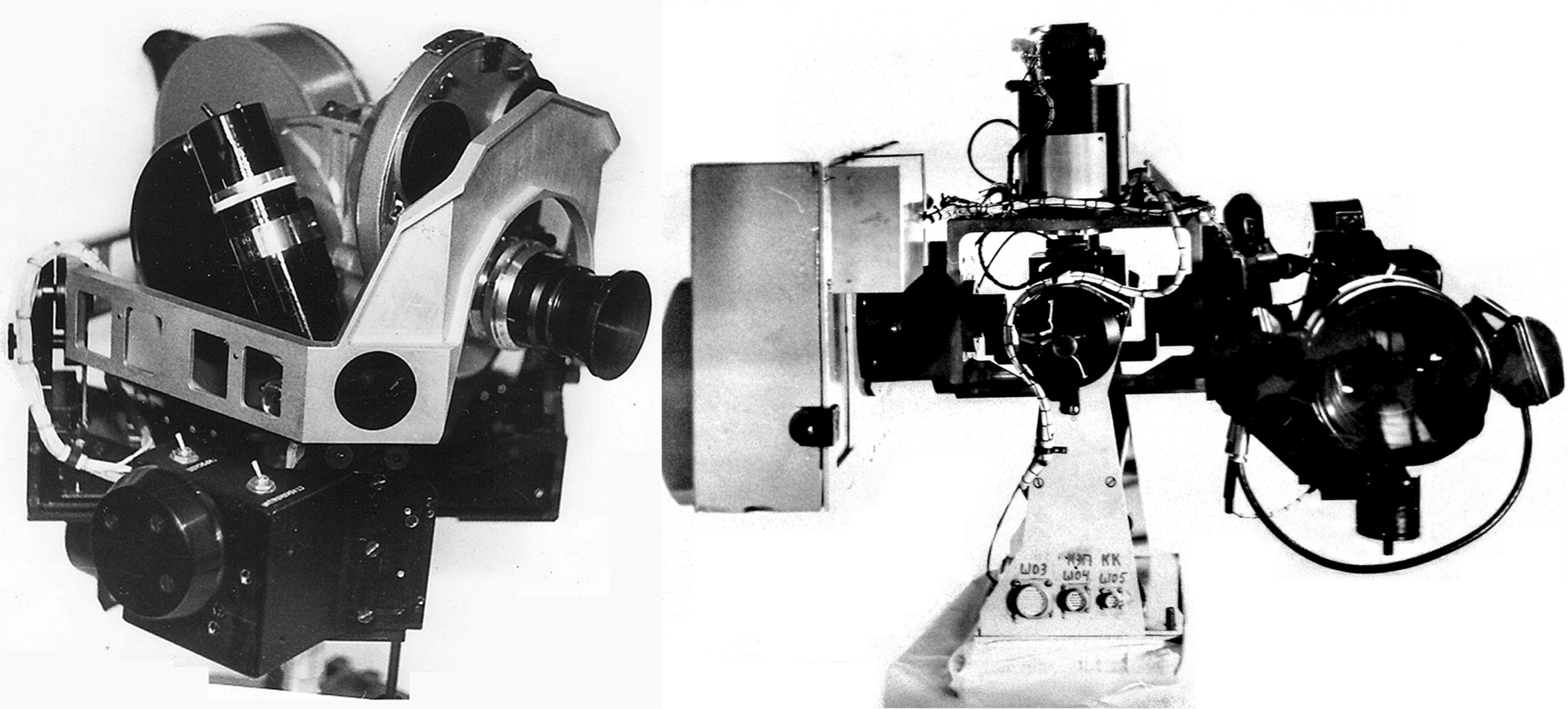








-
В лаборатории гирокомпасов на кафедре ИУ2 ведутся разработки и исследования гироскопических устройств, предназначенных для определения азимутальных направлений на земной поверхности. В разные годы на кафедре велись разработки малогабаритного гироскопического компаса на двухкоординатном датчике угловой скорости на динамически настраиваемом гироскопе, трехстепенного маятникового гирокомпаса.
На кафедре разработан ряд гироскопических инклинометров для определения азимутальных направлений элементов бурильной установки, универсальная забойная телеметрическая система и беспроводная система передачи данных в сотрудничестве с "Научно-Исследовательским Институтом Прикладной Механики им. академика В.И.Кузнецова" и фирмой Schlumberger для телеметрического сопровождения процесса бурения нефтяных и газовых скважин.
в 2007 году совместно с Научно-производственным комплексом автоматики и приборостроения им. академика Н.А. Пилюгина проводились работы по разработке системы азимутальной ориентации радиотелескопа.
В настоящее время работы в лаборатории направлены на создание аккустической системы определения азимутальных направлений для применения при бурении скважин в высоких широтах, где, как известно, качество гироскопических компасов недостаточное для решении задач азимутальной выставки элементов бурильной установки.
-
Основным направлением научно-исследовательской и учебной рабоыт в лаборатории является разработка и исследование гироскопических приборов и систем ориентации. Лаборатория оснащена уникальным, как современными так и представляющим историческую ценность приборами и оборудованием.
При решении задач ориентации и навигации основным является определение положения какого-либо объекта в пространстве. Ориентация предполагает определение углового положения объекта относительно его центра масс. Комплекс приборов и устройств, выполняющих задачу определения углового положения объекта относительно его центра масс, называют системой ориентации.
Формирование таких систем обычно строится по трем основным принципам:
1. Совместное применение отдельных курсовых приборов и систем. К таким приборам и системам можно отнести представленные в лаборатории образцы курсовых приборов, предназначенных для определения курса или азимута объекта (например, гирополукомпас ГА-1), приборов, предназначенных для определения углов крена и тангажа (например, гировертикаль МГВ), и устройствами, определяющими все три угла ориентации (например, курсовертикалью СКВ-2Н).
2. Системы ориентации на базе пространственных гиростабилизаторов. В лаборатории гироприборов представлен ряд платформенных систем ориентации, использующихся в авиационной и ракетной технике. Эти системы построены на базе пространственных трехосных гиростабилизаторов, обеспечивающих стабилизацию платформы, на которой установлены измерительные приборы самой системы (гироскопы и акселерометры), в инерциальном пространстве с соответствующей коррекцией, позволяющей поддерживать неизменным положение платформы в заданной базовой системе координат.
Наряду с платформенными системами в последнее время широко используются бесплатформенные системы ориентации обычно в составе бесплатформенных навигационных систем.
Любой гироскопический прибор, любая система ориентации и навигации, имеет в своем составе гироскопические датчики. Лаборатория гироприборов располагает обширной базой работоспособных образцов таких гироскопичнских датчиков: гироскопов в кардановом подвесе,динамически настраиваемых гироскопов, гироскопов со сферической шарикоподшипниковой опорой, волоконно-оптических и лазерных гироскопов. Задачи повышения точности такх датчиков также входят вкруг интересов лаборатории.



- Лаборатория микромеханических приборов
-
Автоматы стабилизации систем управления летательных аппаратов

Руководитель специализации
кандидат технических наук, доцент
Фащевский Николай Николаевич

Автопилоты представляют собой комплекс приборов, агрегатов
и механизмов, объединенных в бортовую систему, обеспечивающую
автоматическое управление летательным аппаратом (самолетом,
вертолетом, космическим аппаратом). Сложность управления такими аппаратами заключается в том, что они перемещаются в пространстве трех измерений, а не в плоскости, как другие средства перемещения, движение которых ограничено поверхностью земли или воды и при управлении которыми используются ранее проложенные пути (дороги, рельсы, фарватер), которых в воздухе не существует.
В полете выбор пути происходит одновременно с самим движением, для чего человеку необходимо воспринимать показания целого ряда пилотажно-навигационных и других приборов, производить большой по объему комплекс логических и вычислительных операций по обработке и обобщению этих показаний, принятию решения и реализации его путем перемещения соответствующих органов управления летательным аппаратам.
Однако возможности человека ограничены: он способен принять и переработать в единицу времени конечный объем информации, он реагирует на сообщения и события с определенным запаздыванием, ограничены его физические силы. Для расширения возможностей человека по управлению летательными аппаратами используются автопилоты. Кроме того, современные летательные аппараты по причине их аэродинамической неустойчивости, способствующей выполнению фигур высшего пилотажа, вообще не могут пилотироваться без использования автопилота.
Вычислительное устройство автопилота (бортовой компьютер) составляет "мозг" автопилота, пилотажно-навигационные приборы - его "глаза и уши", т.е. его органы чувств, а специальные исполнительные устройства (рулевые приводы) - "руки и ноги".
Таким образом, гироскопические приборы определяют параметры углового движения самолета в пространстве и выдают информацию в вычислительное устройство автопилота, которое обрабатывает ее по определенному алгоритму и формирует управляющие сигналы. Эти сигналы поступают на исполнительные устройства (рулевой привод), которые перемещают рули самолета, что вызывает изменение углового положения самолета в пространстве.
Современные бортовые системы автоматического управления - автопилоты решают практически все задачи, связанные с ручным и автоматическим управлением летательным аппаратом на всех режимах его полета, включая взлет и посадку.
Учебные и научно-исследовательские лаборатории специализации
-
Инерциальные навигационные комплексы
систем управления летательных аппаратов
Руководитель специализации
кандидат технических наук, доцент
Быковский Александр Владимирович
Навигацией в настоящее время принято называть процесс управления движением объекта
из одной точки пространства в другую. Навигация как наука изучает методы и средства вождения
различных объектов (морской корабль, самолет, автомобиль и др.) по различным траекториям,
зависящим от назначения, времени и цели движения объекта. При решении навигационных задач определяются координаты местоположения объекта в выбранной системе отсчета, направление и скорость движения. Комплекс приборов и устройств, выполняющих эти задачи, называют навигационной системой. Различают морскую, воздушную, космическую и наземную навигации.
Наибольшее распространение получил так называемый инерциальный метод навигации и соответствующие ему инерциальные навигационные системы, относящиеся к автономным навигационным системам, не требующим для своей работы дополнительной информации "снаружи". В основе работы этих систем лежит метод определения скорости и местоположения объекта путем счисления пути, базируясь на сигналах акселерометров и гироскопов. Наряду с этим в настоящее время все большее внимание уделяется спутниковым навигационным системам, которые не являются автономными поскольку зависимы от информации получаемой со спутника (снаружи). Зачастую эти оба типа навигации используется вместе в интегрированных навигационных системах.Учебные и научно-исследовательские лаборатории специализации
-
Инерциальные навигационные системы могут быть выполнены в платформенном или бесплатформенном виде. В первом случае датчики первичной информации: гироскопы и акселерометры, располагаются на специальной платформе, стабилизированной в пространстве с помощью этих же гироскопов, во втором случае - акселерометры и гироскопы располагаются непосредственно на корпусе подвижного объекта, а все необходимые преобразования осуществляются бортовой вычислительной машиной.
На многих подвижных объектах отдельные навигационные устройства и системы используются одновременно, т.е. образуют сложные компьютеризированные системы, основанные на различных принципах и методах навигации. Это повышает надежность и точность навигации.
Важной задачей остаются вопросы получения и передачи навигационной информации с ее параллельной алгоритмической обработкой. Все это ставит на повестку дня вопросы создания современных цифровых бесплатформенных систем получения, обработки и накопления информации навигационных датчиков и систем. В этом направлении сотрудниками кафедры ведутся работы по разработке алгоритмов обработки навигационной информации, получаемой от бесплатформенных инерциальных блоков, как высокой точности (на базе твердотельных вибрационных и лазерных гироскопах), так и средней (на базе динамически-настраиваемых и волоконно-оптических гироскопов) и даже низкой точности (микромеханические датчики). По данным вопросам кафедра сотрудничает с ФГУП "Центральный Научно-Исследовательский Институт Автоматики и Гидравлики", ОАО "Раменское Приборостроительное Конструкторское Бюро" и фирмой "Текнол". -
В лаборатории
На кафедре
-
-
Прецизионные электронные устройства
систем управления летательных аппаратов
Руководитель специализации
кандидат технических наук, доцент
Полынков Алексей Викторович
Навигацией в настоящее время принято называть процесс управления движением объекта из
одной точки пространства в другую. Навигация как наука изучает методы и средства вождения
различных объектов (морской корабль, самолет, автомобиль и др.) по различным траекториям,
зависящим от назначения, времени и цели движения объекта. При решении навигационных задач определяются координаты местоположения объекта в выбранной системе отсчета, направление и скорость движения. Комплекс приборов и устройств, выполняющих эти задачи, называют навигационной системой. Различают морскую, воздушную, космическую и наземную навигации.
Наибольшее распространение получил так называемый инерциальный метод навигации и соответствующие ему инерциальные навигационные системы, относящиеся к автономным навигационным системам, не требующим для своей работы дополнительной информации "снаружи". В основе работы этих систем лежит метод определения скорости и местоположения объекта путем счисления пути, базируясь на сигналах акселерометров и гироскопов. Наряду с этим в настоящее время все большее внимание уделяется спутниковым навигационным системам, которые не являются автономными поскольку зависимы от информации получаемой со спутника (снаружи). Зачастую эти оба типа навигации используется вместе в интегрированных навигационных системах. -
Технологии производства высокоточных приборов и
систем управления летательными аппаратами
Руководитель специализации
кандидат технических наук, доцент
Пономарёв Юрий Анатольевич
Навигацией в настоящее время принято называть процесс управления движением объекта из
одной точки пространства в другую. Навигация как наука изучает методы и средства вождения
различных объектов (морской корабль, самолет, автомобиль и др.) по различным траекториям,
зависящим от назначения, времени и цели движения объекта. При решении навигационных задач определяются координаты местоположения объекта в выбранной системе отсчета, направление и скорость движения. Комплекс приборов и устройств, выполняющих эти задачи, называют навигационной системой. Различают морскую, воздушную, космическую и наземную навигации.
Наибольшее распространение получил так называемый инерциальный метод навигации и соответствующие ему инерциальные навигационные системы, относящиеся к автономным навигационным системам, не требующим для своей работы дополнительной информации "снаружи". В основе работы этих систем лежит метод определения скорости и местоположения объекта путем счисления пути, базируясь на сигналах акселерометров и гироскопов. Наряду с этим в настоящее время все большее внимание уделяется спутниковым навигационным системам, которые не являются автономными поскольку зависимы от информации получаемой со спутника (снаружи). Зачастую эти оба типа навигации используется вместе в интегрированных навигационных системах.